ГлавнаяПроектыСистема управления роботом на базе KasperskyOS c помощью веб-камеры
Гуськова Ю.
Система управления роботом на базе KasperskyOS c помощью веб-камеры
Проект является одним из призеров хакатона в МАИ в 2022 г.
1. Задачи проекта
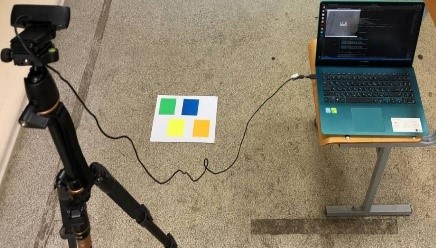
реализовать удаленное соединение робота с управляющей программой по протоколу TCP в одной локальной среде;
реализовать функциональность управления двигателем через порты GPIO;
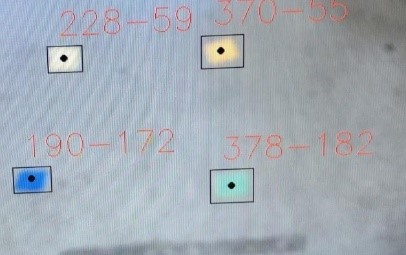
реализовать функциональность распознавания робота и его целей;
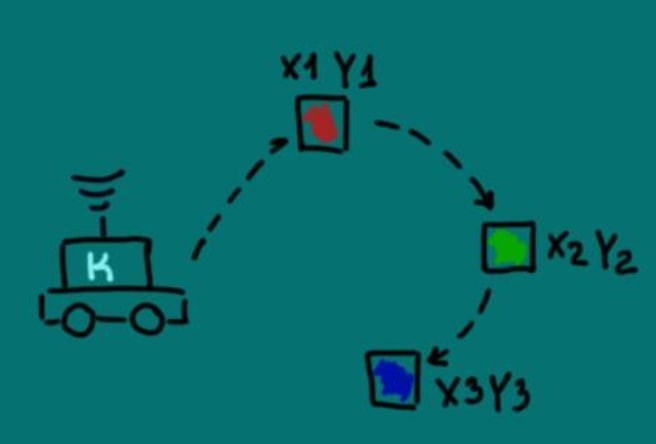
создать алгоритм управления роботом через внешнюю камеру.
2. Результат работ по проекту
color.py — Python-программа для распознования стикеров разных цветов, записи координат их расположения и перевода их в реальные координаты с помощью гомографии.