Issuing control commands (forward, backward, stop, left, right) to AlphaBot motors by GPIO — implemented (implemented PWM functional for motor control)
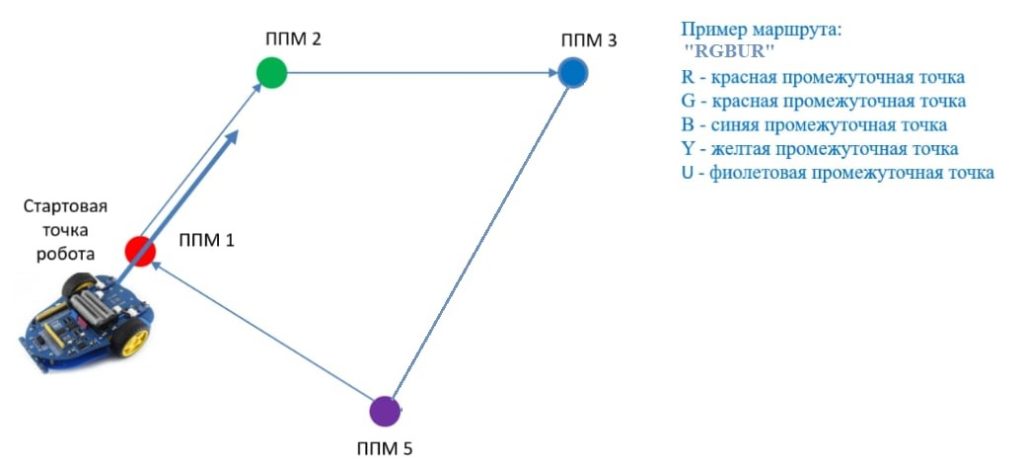
Driving along a given route (rectangle) — implemented
Receiving commands over the network — not tested
Debugging and integration testing — not implemented
3. Solution operability checking
Problems in the project
Tasks involving GPIO and network sharing in Kaspersky are not debugged. Caused by errors when writing PSL policies.
Final tests in the project:
Travel along a given fixed route (rectangle) — completed
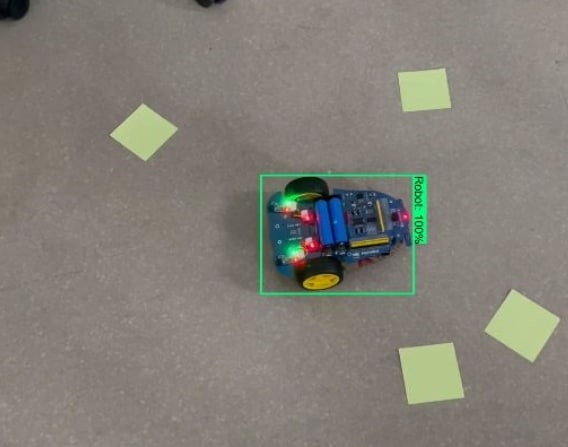
Driving along the route by commands from the recognition server — not completed
4. Supplementary project information
В рамках XLVIII Международной молодежной научной конференции «Гагаринские чтения — 2022» (https://gagarin.mai.ru/files/2022/abstracts2022.pdf) Цатурьян К. А. (автор проекта), Тимошенко А. В., Кострицына А. И. сделали доклад «Разработка прототипа системы управления автономным роботом на базе KasperskyOS», который занял 2-е место в секции «Робототехника» и вошел в сборник тезисов работ конференции: XLVIII Гагаринские чтения 2022. — М.: Издательство «Перо», 2022. — Мб. [Электронное издание]. ISBN 978-5-00204-326-2