Issuing control commands (forward, backward, stop, left, right) to AlphaBot motors by GPIO — implemented (implemented PWM functional for motor control)
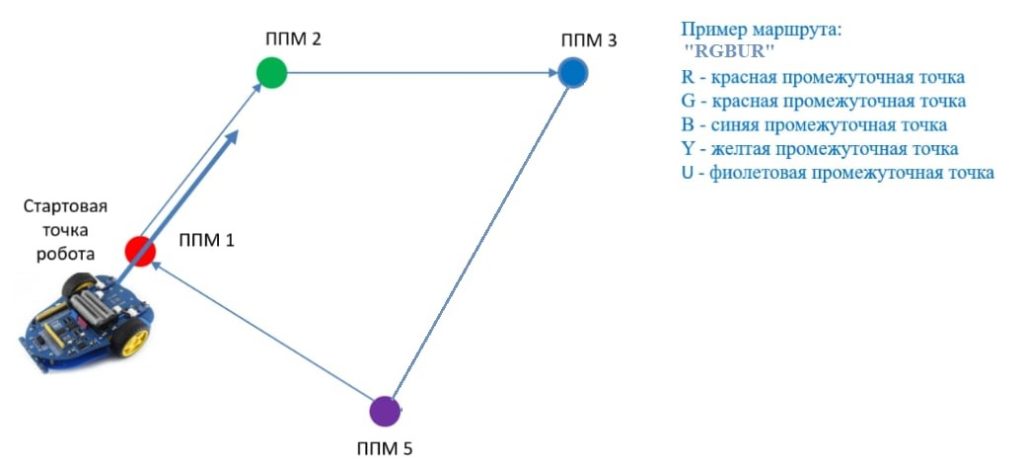
Driving along a given route (rectangle) — implemented
Receiving commands over the network — not tested
Debugging and integration testing — not implemented
3. Solution operability checking
Problems in the project
Tasks involving GPIO and network sharing in Kaspersky are not debugged. Caused by errors when writing PSL policies.
Final tests in the project:
Travel along a given fixed route (rectangle) — completed
Driving along the route by commands from the recognition server — not completed
4. Supplementary project information
В рамках XLVIII Международной молодежной научной конференции «Гагаринские чтения — 2022» (https://gagarin.mai.ru/files/2022/abstracts2022.pdf) Цатурьян К. А. (автор проекта), Тимошенко А. В., Кострицына А. И. сделали доклад «Разработка прототипа системы управления автономным роботом на базе KasperskyOS», который занял 2-е место в секции «Робототехника» и вошел в сборник тезисов работ конференции: XLVIII Гагаринские чтения 2022. — М.: Издательство «Перо», 2022. — Мб. [Электронное издание]. ISBN 978-5-00204-326-2
Ссылка на скачивание придет на email, если он указан в профиле «ВКонтакте».
Для получения ссылки через личные сообщения необходимо вступить в сообщество.
Шаг 2
Разрешите уведомления от сообщества, чтобы получить ссылку
Шаг 3
Вступите в сообщество разработчиков KasperskyOS CE
Загрузка KasperskyOS
Community Edition
Подпишитесь на наши сообщества и получите ссылку на дистрибутив в чате
На указанный вами адрес электронной почты выслано письмо со ссылкой на скачивание KasperskyOS Community Edition. Если вы не получили письмо, пожалуйста, проверьте правильность указанного адреса и, при необходимости, отправьте запрос еще раз.
Команда KasperskyOS
Заявка на будущее мероприятие KasperskyOS Night
Ваш запрос отправлен
В ближайшее время вы получите ответ на указанную электронную почту
Форма обратной связи
Ваш вопрос отправлен
В ближайшее время вы получите ответ на указанную электронную почту
Форма обратной связи
Ваш вопрос отправлен
В ближайшее время вы получите ответ на указанную электронную почту
Стать партнером
Ваш запрос отправлен
В ближайшее время вы получите ответ на указанную электронную почту
Заполните форму, чтобы получить запись трансляции и быть в курсе предстоящих событий
Ваш запрос отправлен
В ближайшее время вы получите ответ на указанную электронную почту